
Serene – 1 is quite a distinctive boat, originally took inspiration from the Black Pearl and the Anas Acuta, but in it current status, it shares not a single common point with them. The hull has been transformed into a light cruising one with long water line, deeper V bottom, little rockers and a very narrow beam (45 cm). There’re times that I’m worrying on the feasibility of the design, except for some theoretical calculations, there’s nothing to ensure me that it would be a good watercraft.
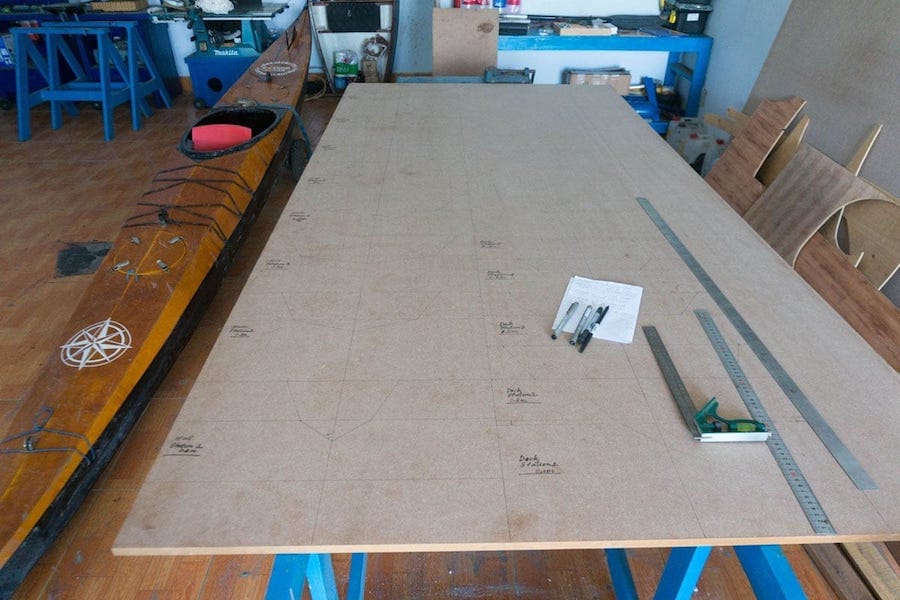



When you build something from a well – known designer, it’s already a well – proven boat. For Serene – 1, there’s no way to know, unless you build and trial it yourself. Eventually have some free time to proceed on today, first is cutting all the hull & deck framing stations in MDF. Can also see drawn is the cockpit template, this would be a very small one, 50×40 cm in dimensions, that’s what they called an “ocean cockpit”, you would need to climb over the aft deck and slide your legs into the hole.




The framing box showed up, by now, I could see how slim the boat would be, at this size, you just don’t ride the kayak, you essentially… wear it! Like an integral part of your body going to rough water, that’s how the feeling should be! Next would be the important task of drawing, and cutting the bilges from exported offset tables. For ones who don’t know, offset table is just a matrix of (x, y) coordinates, I use a very fine matrix (points every 5 cm interval) to precisely reconstruct the bilges on plywood.
Serene – 1 p1
Serene – 1 p2
Serene – 1 p3
Serene – 1 p4
One important note about various hull shapes (V – bottom, round, flat, etc…), cross section only affect stabilities, they have little effect on the boat’s speed which depends mostly on the waterline length and the wetted surface area. I tend to prefer hard chined V – bottom though.
About Prismatic Coefficient (Cp): a lower value indicates that the boat is more efficient at slower speed, a higher one tells that the boat is more efficient the faster it goes. So higher or lower Cp is neither good nor bad, it’s just that you need to know where is your desired range of velocity.